vrep笔记
vrep笔记
这些天主要对vrep做了一些探索,一些笔记如下:
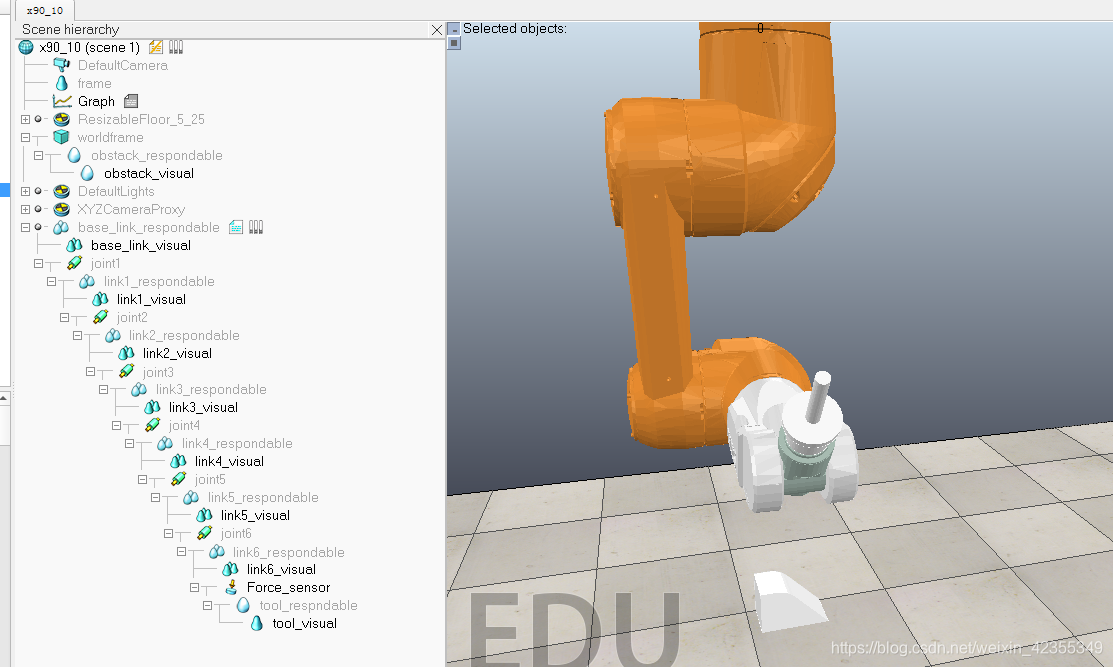
1.urdf机器人模型文件的导入 点击plugins-urdf importing即可
2.动力学模型的配置
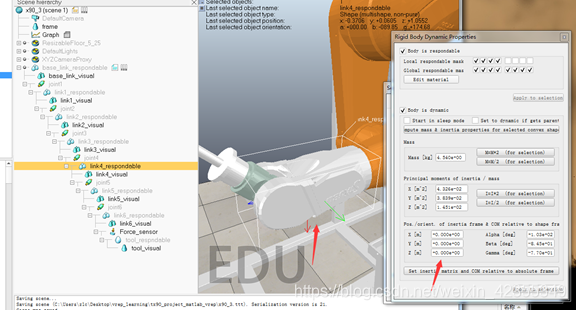
将此处改成零,大意是以方框的正中心为质心,否则很容易抖!!模型导入后坐标系都会被这个包围盒的坐标系覆盖,上面的bady is responsable表示刚体是有碰撞特性的,一般前一个臂如果前四个打钩,后一个臂则后四个打钩,bady is dynamic表示是该物体是动态的,即受到一定的力会动,各个关节轴配置如下,力矩控制模式,其中position是当前关节,改了机器人会动,target position是目标关节,如果一切都配置好了的话,点击仿真按钮机械臂会走到该关节位置(不会抖!)

3. 末端工具和力传感器添加

这里就需要熟练使用这两个按钮了
因为导入后坐标系是包围盒中心,看包围盒的尺寸大小如下,通过平移旋转工具调到与末端法兰盘间是自由落体运动才行,最后再add-forcesensor,即可稳定连接(vrep里坐标系是真的烦)

4. matlab通讯

随便添加一个脚本,写上
-- This is a threaded script.
simRemoteApi.start(19999,1300,false,true)function sysCall_threadmain()end
新建一个文件夹拷贝下面文件,新建一个脚本写上如下代码
disp('Program started');
vrep=remApi('remoteApi'); % using the prototype file (remoteApiProto.m)
vrep.simxFinish(-1); % just in case, close all opened connections
id=vrep.simxStart('127.0.0.1',19997,true,true,5000,5);
if (id>-1)disp('Connected to remote API server');%%cyclic control
while (vrep.simxGetConnectionId(id)~=-1 )%此处添加相关代码end % Now close the connection to V-REP:vrep.simxStopSimulation(id,vrep.simx_opmode_oneshot_wait);vrep.simxFinish(id);
elsedisp('Failed connecting to remote API server');
endvrep.delete(); % call the destructor! disp('Program ended');先打开一个vrep场景,再运行上述代码,结果如下:

5 一些相关命令示例
sim_opmode_blocking 阻塞模式
simx_opmode_oneshot_wait 非阻塞函数 适用于向V-rep 发送数据而不需要回复
simx_opmode_streaming 数据流模式
simxSynchronousTrigger(id); %同步操作,很重要!!
%获取关节句柄[res,armJoints(1)] = vrep.simxGetObjectHandle(id,'joint1',vrep.simx_opmode_oneshot_wait); %获取力传感器句柄[res,external_force_sensor] = vrep.simxGetObjectHandle(id,'Force_sensor',vrep.simx_opmode_oneshot_wait);%获取关节位置 vrep.simxGetJointPosition(id,armJoints(i),vrep.simx_opmode_streaming);%获取关节速度 可以查matlab API 参数2012表示为关节速度vrep.simxGetObjectFloatParameter(id,armJoints(i),2012,vrep.simx_opmode_streaming)%获取关节力vrep.simxGetJointForce(id,armJoints(i),vrep.simx_opmode_streaming);%读取力传感器vrep.simxReadForceSensor(id,external_force_sensor,vrep.simx_opmode_streaming);%设置目标位置 !!基于位置的控制res = vrep.simxSetJointTargetPosition(id, joint_handles(i), target_joint_position (i), vrep.simx_opmode_oneshot);%设置仿真参数,可以设置仿真步长 记得选择custom vrep.simxSetFloatingParameter(id,vrep.sim_floatparam_simulation_time_step,dt,vrep.simx_opmode_oneshot_wait);
最后看下我的一个仿真图

