STM32——电容触摸按键实验
STM32——电容触摸按键实验
一、电容触摸按键原理
RC电路充放电原理: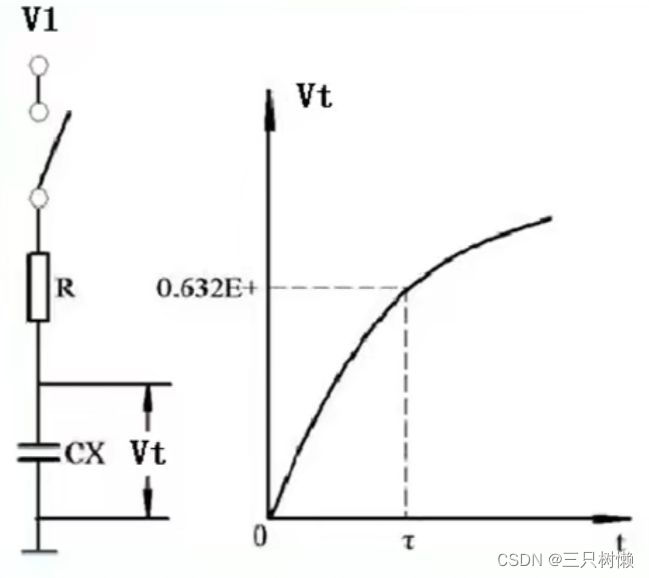
R为电阻,CX为电容,按下按钮电容CX开始充电,直至与V1相同。
RC电路充放电公式:Vt=V0+(V1-V0)*[1-exp(-t/RC)]
V0为电容上的初始电压值;V1为电容最终可充到或放到的电压值;Vt为t时刻电容上的电压值;
当V0=0,公式简化为:Vt=V1*[1-exp(-t/RC)]
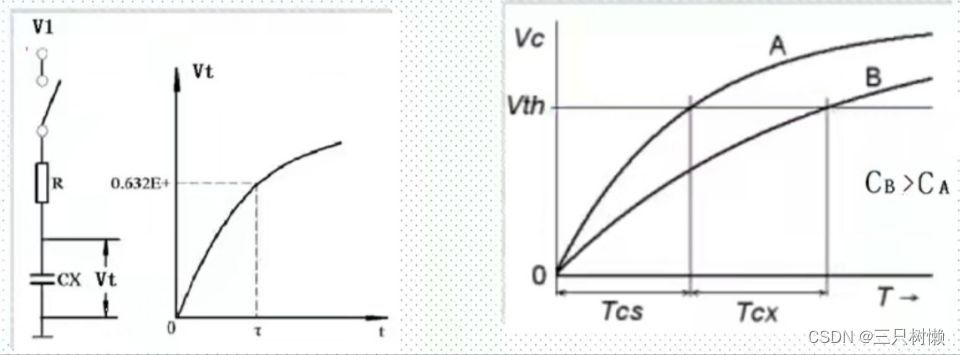
即同样的条件下,电容值C跟时间t成正比关系,电容越大,充电到达某个临界值的时间越长。(零状态响应)
电容触摸按键原理图:
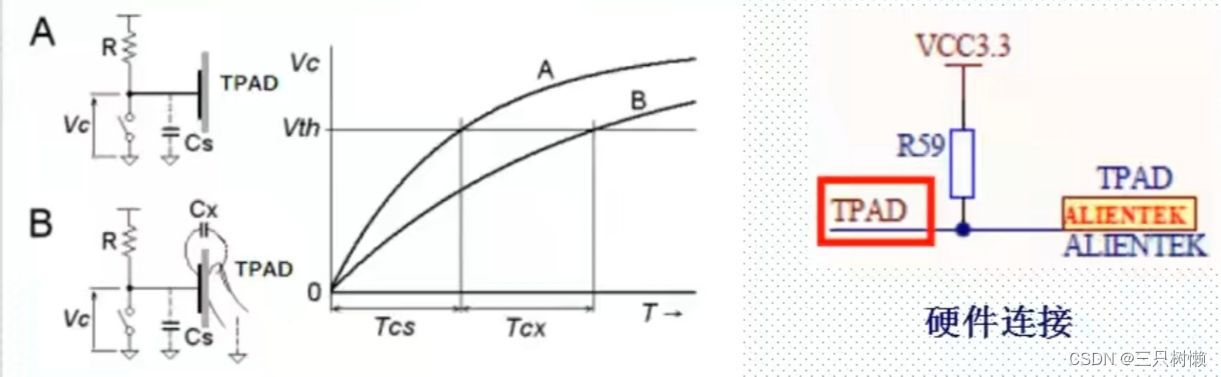
R:外接电容充放电电阻;Cs:TPAD和PCB间的杂散电容;Cx:手指按下时,手指和TPAD之间形成电容。 开关:电容放电开关,由STM32IO口代替;
原理分析:无手指触摸时,电路中只有一个电容Cs,且充放电时间大小固定。当手指触摸到LOGO时,手指与地会形成一个电容Cx,Cx与Cs并联,总电容值增大。根据零状态响应原理(不同电容到达相同电压时,电容越大所需时间越长),与之前未触摸相比,电容到达相同电压时间增长,系统因此检测到触摸。
检测电容触摸按键过程:
1、TPAD引脚设置为推挽输出,输出0,实现电容放电到0。
2、TPAD引脚设置为浮空输入(IO复位后的状态),电容开始放电。
3、同时开启TPAD引脚的输入捕获开始捕获。
4、等待充电完成(充电到底Vx,检测到上升沿)。
5、计算充电时间。
注:没有按下的时候,充电时间为T1(default)。按下TPAD,电容变大,所以充电时间为T2.我们可以通过检测充放电时间来判断是否按下。如果T2-T1大于某个值,就可以判断有按键按下。
二、程序设计思路
重要函数:
1、void TPAD_Reset(void)函数:复位TPAD
设置IO口为推挽输出输出0,电容放电。等待放电完成之后,设置为浮空输入,从而开始充电。同时把计数器的CNT设置为0。
2、TPAD_Get_Val()函数:获取一次捕获值(得到充电时间)
复位TPAD,等待捕获上升沿,捕获之后,得到定时器的值,计算充电时间。
3、TPAD_Get_MaxVal()函数:
多次调用TPAD_Get_Val()函数获取充电时间,获取最大的值。
4、TPAD_Init()函数:初始化TPAD
在系统启动之后,初始化输入捕获。先10次调用TPAD_Get_Val()函数获取10次充电时间,然后获取中间N(N=8或者6)次的平均值,作为在没有电容触摸按键按下的时候的充电时间缺省值tpad_default_val。
5、TPAD_Scan()函数:扫描TPAD
调用TPAD_Get_MaxVal()函数获取多次充电中最大的充电时间,与tpad_default_val比较,如果大于某个值,则认为有触摸动作。
6、void TIM5_CH2_Cap_Init(u16 arr,u16 psc)函数:输入捕获通道初始化
可以使用任何一个定时器,M3用定时器5,M4用定时器2。

#define TPAD_ARR_MAX_VAL 0XFFFFFFFF
vu16 tpad_default_val=0;
u8 TPAD_Init(u8 psc)
{u16 buf[10];u16 temp;u8 i,j;TIM2_CH1_Cap_Init(TPAD_ARR_MAX_VAL,psc-1);for(i=0;i<10;i++){buf[i]=TPAD_Get_Val();delay_ms(10);}for(i=0;i<9;i++){for(j=i+1;j<10;j++){if(buf[i]>buf[j]){temp=buf[i];buf[i]=buf[j];buf[j]=temp;}}}temp=0;for(i=2;i<8;i++) temp+=buf[i];tpad_default_val=temp/6;printf("tpad_default_val:%d\r\n",tpad_default_val);if(tpad_default_val>TPAD_ARR_MAX_VAL/2) return 1;return 0;
}
void TPAD_Reset(void)
{GPIO_InitTypeDef GPIO_InitABC;GPIO_InitABC.GPIO_Mode=GPIO_Mode_OUT;GPIO_InitABC.GPIO_OType=GPIO_OType_PP;GPIO_InitABC.GPIO_Pin=GPIO_Pin_5;GPIO_InitABC.GPIO_PuPd=GPIO_PuPd_DOWN;GPIO_InitABC.GPIO_Speed=GPIO_Speed_100MHz;GPIO_Init(GPIOA,&GPIO_InitABC);GPIO_ResetBits(GPIOA,GPIO_Pin_5);delay_ms(5);TIM_ClearITPendingBit(TIM2,TIM_IT_CC1|TIM_IT_Update);TIM_SetCounter(TIM2,0);GPIO_InitABC.GPIO_Mode=GPIO_Mode_AF;GPIO_InitABC.GPIO_OType=GPIO_OType_PP;GPIO_InitABC.GPIO_Pin=GPIO_Pin_5;GPIO_InitABC.GPIO_PuPd=GPIO_PuPd_NOPULL;GPIO_InitABC.GPIO_Speed=GPIO_Speed_100MHz;GPIO_Init(GPIOA,&GPIO_InitABC);
}u16 TPAD_Get_Val(void)
{TPAD_Reset();while(TIM_GetFlagStatus(TIM2,TIM_IT_CC1)==RESET){if(TIM_GetCounter(TIM2)>TPAD_ARR_MAX_VAL-500)return TIM_GetCounter(TIM2);}return TIM_GetCapture1(TIM2);
}u16 TPAD_Get_MaxVal(u8 n)
{u16 temp=0;u16 res=0;while(n--){if(temp>res) res=temp;}return res;
}
#define TPAD_GATE_VAL 100
u8 TPAD_Scan(u8 mode)
{static u8 keyen=0; u8 res=0;u8 sample=3;u16 rval;if(mode){sample=6;keyen=0;}rval=TPAD_Get_MaxVal(sample); if(rval>(tpad_default_val+TPAD_GATE_VAL)&&rval<(10*tpad_default_val)){ if((keyen==0)&&(rval>(tpad_default_val+TPAD_GATE_VAL))){res=1;} keyen=3;} if(keyen)keyen--; return res;
}void TIM2_CH1_Cap_Init(u32 arr,u16 psc)
{GPIO_InitTypeDef GPIO_InitABC;TIM_TimeBaseInitTypeDef TIM_TimeBaseInitABC;TIM_ICInitTypeDef TIM_ICInitABC;RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);GPIO_PinAFConfig(GPIOA,GPIO_PinSource5,GPIO_AF_TIM2);GPIO_InitABC.GPIO_Mode=GPIO_Mode_AF;GPIO_InitABC.GPIO_OType=GPIO_OType_PP;GPIO_InitABC.GPIO_Pin=GPIO_Pin_5;GPIO_InitABC.GPIO_PuPd=GPIO_PuPd_NOPULL;GPIO_InitABC.GPIO_Speed=GPIO_Speed_100MHz;GPIO_Init(GPIOA,&GPIO_InitABC);TIM_TimeBaseInitABC.TIM_ClockDivision=TIM_CKD_DIV1;TIM_TimeBaseInitABC.TIM_CounterMode=TIM_CounterMode_Up;TIM_TimeBaseInitABC.TIM_Period=arr;TIM_TimeBaseInitABC.TIM_Prescaler=psc;TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitABC);TIM_ICInitABC.TIM_Channel=TIM_Channel_1;TIM_ICInitABC.TIM_ICFilter=0X00;TIM_ICInitABC.TIM_ICPolarity=TIM_ICPolarity_Rising;TIM_ICInitABC.TIM_ICPrescaler=TIM_ICPSC_DIV1;TIM_ICInitABC.TIM_ICSelection=TIM_ICSelection_DirectTI;TIM_ICInit(TIM2,&TIM_ICInitABC);TIM_Cmd(TIM2,ENABLE);
}
int main(void)
{u8 t=0;NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);delay_ms(168);uart_init(115200);LED_Init();TPAD_Init(8);while(1){if(TPAD_Scan(0)){LED1=!LED1;}t++;if(t==15){t=0;LED0=!LED0;}delay_ms(10);}
}STM32电容触摸实验