TB6612FNG电机驱动模块使用说明
TB6612FNG电机驱动模块使用说明
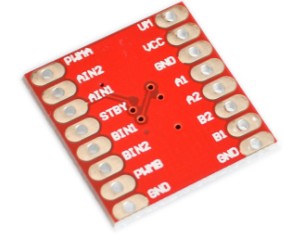
TB6612FNG电机驱动模块

TB6612的的用法:
TB6612是双驱动,也就是可以驱动两个电机
下面分别是控制两个电机的IO口
STBY口接单片机的IO口清零电机全部停止,置1通过AIN1 AIN2,BIN1,BIN2 来控制正反转
VM 接15V以内电源
VCC 接2.7v – 5V电源
GND 接地
驱动1路
PWMA 接单片机的PWM口
真值表:
AIN1 0 0 1
AIN2 0 1 0
停止 正传 反转
A01
AO2 接电机1的两个脚
驱动2路
PWMB 接单片机的PWM口
真值表:
BIN1 0 0 1
BIN2 0 1 0
停止 正传 反转
B01
BO2 接电机2的两个脚
注意: 若是pwm控制,则需要pwm频率100khz ,亲测80khz也好用,同时STBY引脚需要接高电平
Description: The TB6612FNG motor driver can control up to two DC motors at a constant current of 1.2A (3.2A peak). Two input signals (IN1 and IN2) can be used to control the motor in one of four function modes - CW, CCW, short-brake, and stop. The two motor outputs (A and B) can be separately controlled, the speed of each motor is controlled via a PWM input signal with a frequency up to 100kHz. The STBY pin should be pulled high to take the motor out of standby mode.CJMCU.
Logic supply voltage (VCC) can be in the range of 2.7-5.5VDC, while the motor supply (VM) is limited to a maximum voltage of 15VDC. The output current is rated up to 1.2A per channel (or up to 3.2A for a short, single pulse).
Board comes with all components installed as shown. Decoupling capacitors are included on both supply lines. All pins of the TB6612FNG are broken out to two 0.1" pitch headers; the pins are arranged such that input pins are on one side and output pins are on the other.
Features:
Power supply voltage: VM=15V max, VCC=2.7-5.5V
Output current: Iout=1.2A(average) / 3.2A (peak)
Standby control to save power
CW/CCW/short brake/stop motor control modes
Built-in thermal shutdown circuit and low voltage detecting circuit
All pins of the TB6612FNG broken out to 0.1" spaced pins
Filtering capacitors on both supply lines