单片机之步进电机驱动篇(一)
单片机之步进电机驱动篇(一)
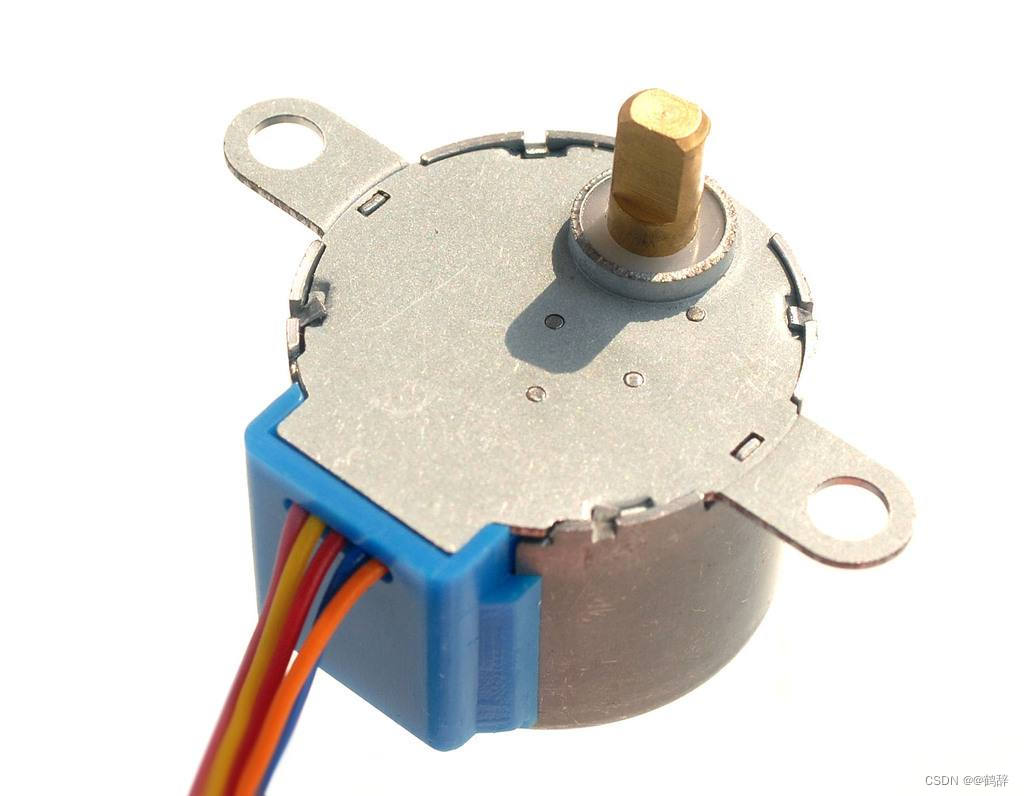
步进电机的简介:步进电机是一种将电脉冲转化为角位移的执行机构。当步进电机驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个步距角。通过控制脉冲来控制角位移量,也可以实现对电机的加减速和正反转的控制。常用的电机是28BYJ-48,如图所示:
步进电机的转动原理:改变绕组的磁场,就可以使步进电机正转和反转,改变磁场切换的时间间隔,就可以控制步进电机的速度。
步进电机的一些知识点:
1,相数:产生不同对极N,S磁场的磁线圈对数。
2,拍数:完成1个磁场周期性变化所需的脉冲数。例如由四相四拍,四相八拍。
3,步距角:对应一个脉冲信号,电机的转子转过的角位移。
单片机不能直接驱动步进电机,所以下面介绍下驱动电路:ULN2003芯片
ULN2003是达林顿阵列,内部是一个“非门”电路,包含7个单元(16个引脚)具体引脚作用网上查找资料;
单片机与ULN2003的连接图:

用单片机实现步进电机的运转(四相八拍)代码程序:
#include "reg52.h"
typedef unsigned char u8;
typedef unsigned int u16;
sbit A = P1^0; //定义引脚
sbit b = P1^1;
sbit C = P1^2;
sbit D = P1^3;
void setmotor();
void motor_cs();
void Timer0Init();u8 motorstep=0; //步进电机步序
u16 Tim;
#define speed 12;
void Timer0() interrupt 1
{ static u16 count;TH0=0xfc;TL0=0x18;if(count -- ==0){count=5;Tim=1;}}
int main()
{Timer0Init();motor_cs();while(1){setmotor();}}void motor_cs()
{A=1;b=1;C=1;D=1;
}void setmotor()
{switch(motorstep){case 0: //aif(Tim){A=0;b=1;C=1;D=1;motorstep=1;Tim=0;}break;case 1: //abif(Tim){A=0;b=0;C=1;D=1;motorstep=2;Tim=0;}break; case 2:if(Tim){A=1;b=0;C=1;D=1;motorstep=3;Tim=0;}break;case 3:if(Tim){A=1;b=0;C=0;D=1;motorstep=4;Tim=0;}break;case 4:if(Tim){A=1;b=1;C=0;D=1;motorstep=5;Tim=0;}break;case 5:if(Tim){A=1;b=1;C=0;D=0;motorstep=6;Tim=0;}break;case 6:if(Tim){A=1;b=1;C=1;D=0;motorstep=7;Tim=0;}break;case 7:if(Tim){A=0;b=1;C=1;D=0;motorstep=0;Tim=0;}break;}}void Timer0Init() //定时器中断的初始化
{TMOD=TMOD|0X01;TH0=0xfc;TL0=0x18;ET0=1;EA=1;TR0=1;}、