保姆级教学——虚拟机器人平台vrep(coppeliaSim)的机器人平台搭建
保姆级教学——虚拟机器人平台vrep(coppeliaSim)的机器人平台搭建
2022年7月16日更新:
本方法只适用于4.0.0和4.0.0以前的Coppeliasim(Vrep)。4.0.0之后的版本请看https://blog.csdn.net/qq_39243015/article/details/124996317
2022年7月27日更新:
视频教学:https://www.bilibili.com/video/BV1XT411J7SM?spm_id_from=333.999.0.0&vd_source=664f9df27fdb05305d92c33305d1e122
视频教学2:https://www.bilibili.com/video/BV1kS4y177z5?spm_id_from=333.999.0.0&vd_source=664f9df27fdb05305d92c33305d1e122
正文
注:本文只针对简单基础的平台搭建,目的是快速构建一个能够进行机械臂仿真,实践强化学习的环境。
环境:windows 10,coppliaSim 版本,python:3.7

首先,我们新建一个scene,

然后我们添加一个机械臂UR5,把它加到地图中央,双击关节角图标,然后点UR5_joint1~UR5_joint6设置一下关节角,
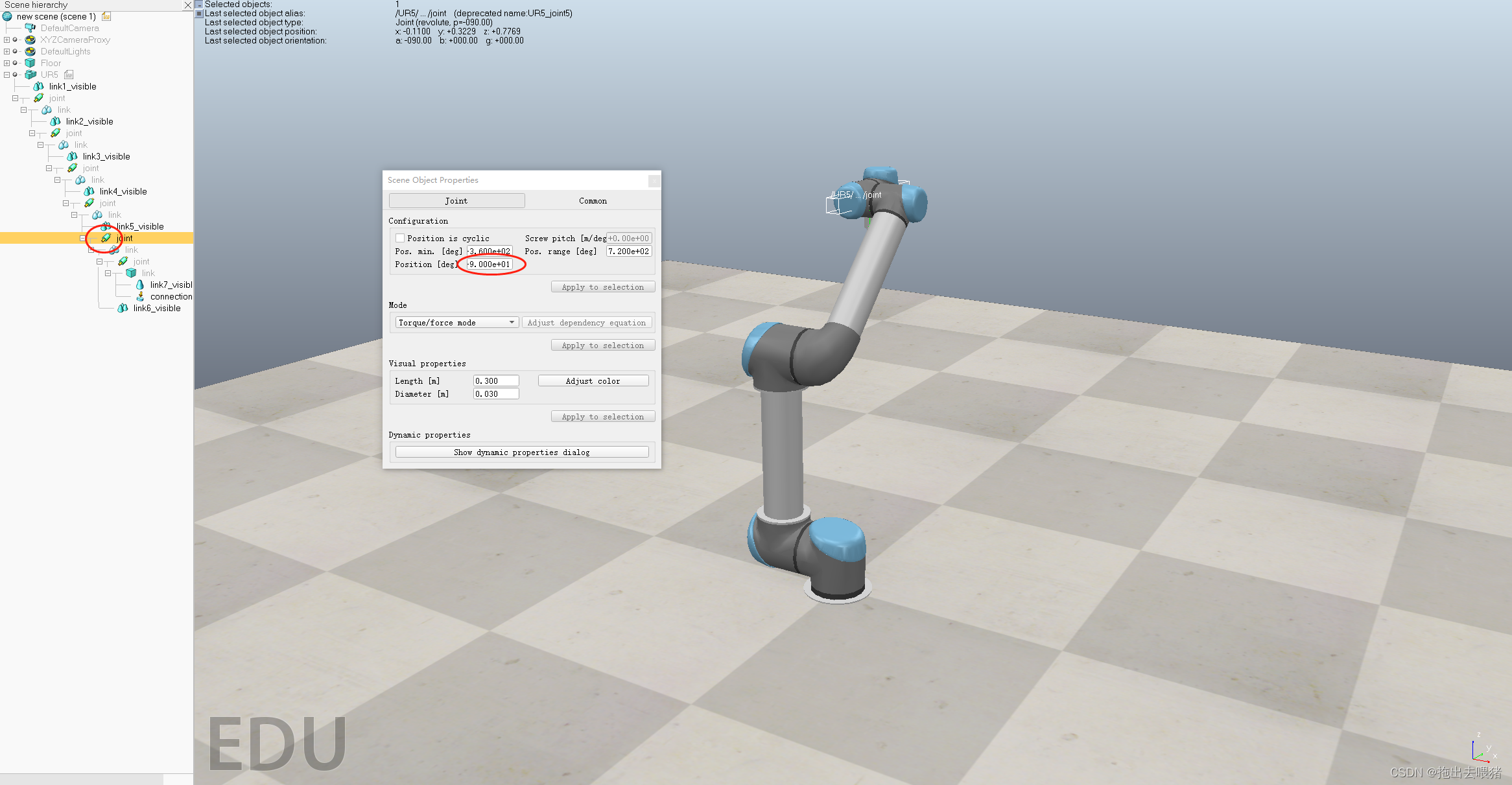
分别是0,0,45,45,-90,0。接着我们添加爪头RG2,在components地grippers下面,把它拉到UR5_connection下面。

然后调整它的位置,


接着我们添加dummy,右键-Add-Dummy,然后把它拉到UR5_joint6下面
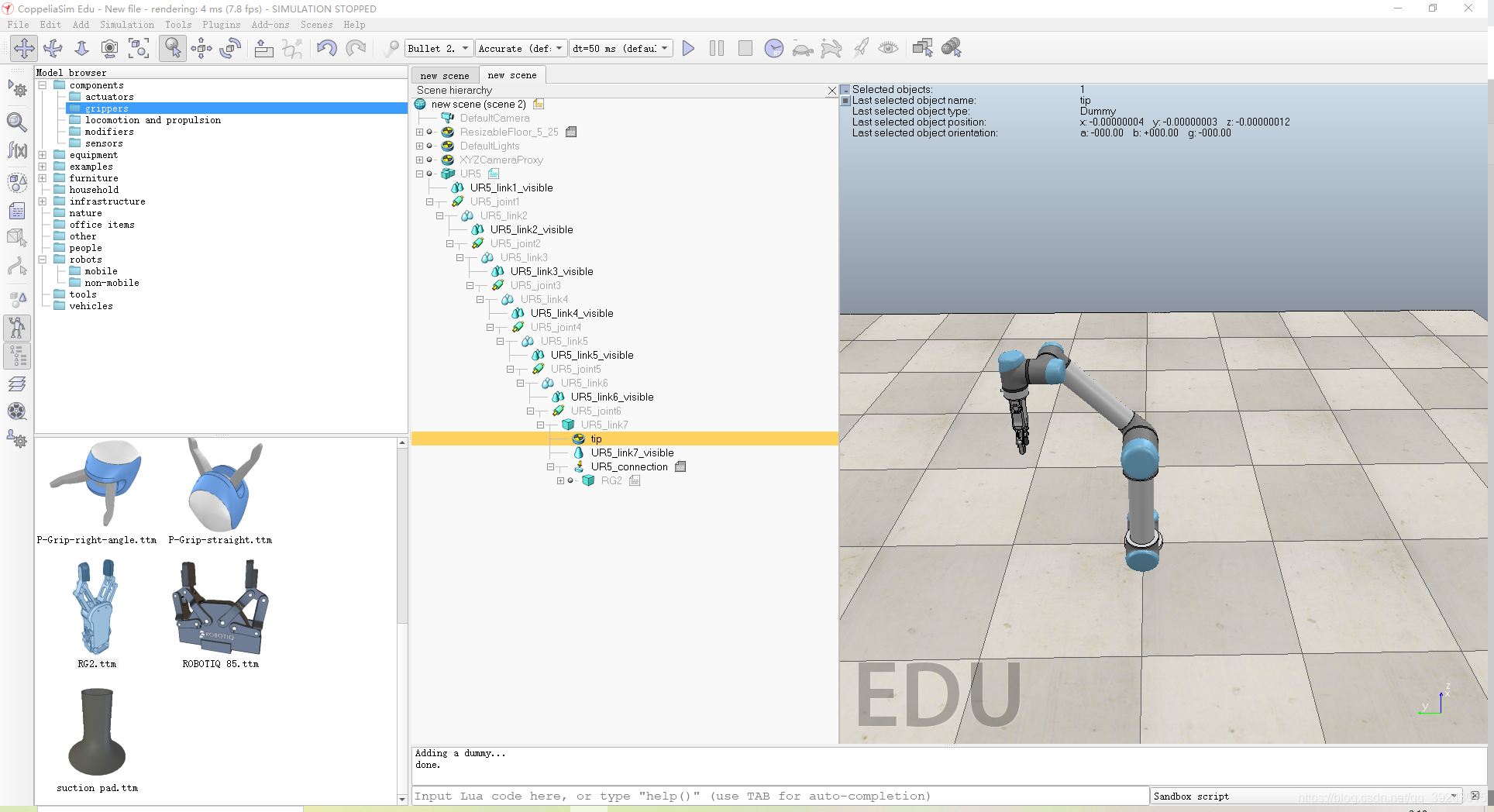
复制这个dummy,把复制出来地拉到UR5下面,
然后设定所有UR5的joint为

按住control,选中tip和target,设为一对IK


然后把target和tip的位置设置一下


接着点击

设置IK的函数关系

Add new IK Group

然后,在IK Group里Add new IK element with tip, Base选择UR5,其他参数照图设置

至此,vrep(coppeliaSim)上的工作已经全部完成。通过移动target机械臂就会自动规划轨迹,夹住target。可以在远端通过调用函数来控制机械臂的抓取。
sim_ret, UR5_target_handle = sim.simxGetObjectHandle(sim_client, 'target', sim.simx_opmode_blocking)
sim.simxSetObjectPosition(sim_client, UR5_target_handle, -1, (-0.5, 0, 0.3), sim.simx_opmode_blocking)